{kind=link}
Table of Contents
I- Définitions
Partie A. Altitudes
1. Altitudes
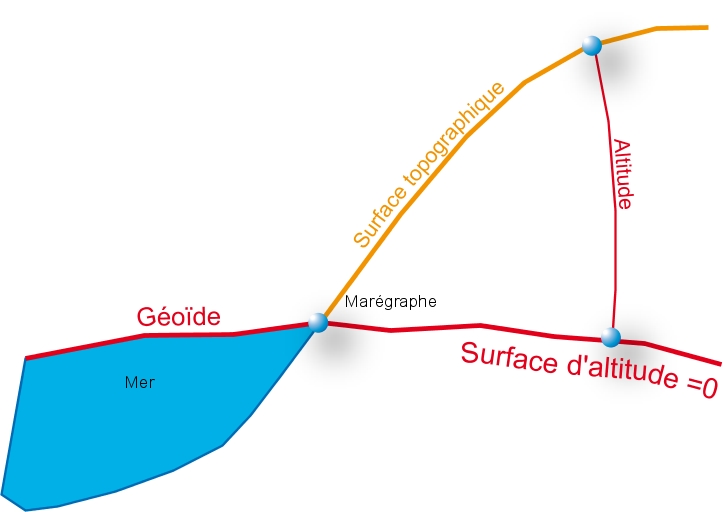
L’altitude, dans le langage commun, exprime l’éloignement d’un objet par rapport au niveau moyen de la mer. Elle exprime également une réalité physique, l’eau s’écoule du point d’altitude le plus élevé vers le point d’altitude le plus faible.
Cette notion fait appel aux forces qui s’exercent sur les particules d’eau :
- Forces de gravité
- Forces centrifuges
A la modélisation de la surface de référence :
- Géoïde
A la méthode de calcul du trajet entre le point considéré et la surface d’altitude nulle.
- Altitudes orthométriques
- Altitudes normales
- Altitudes dynamiques
Partie B. Nivellement
1. Principes
Le nivellement est l’ensemble des opérations qui permettent de déterminer des altitudes et des dénivelées (différences d’altitudes).
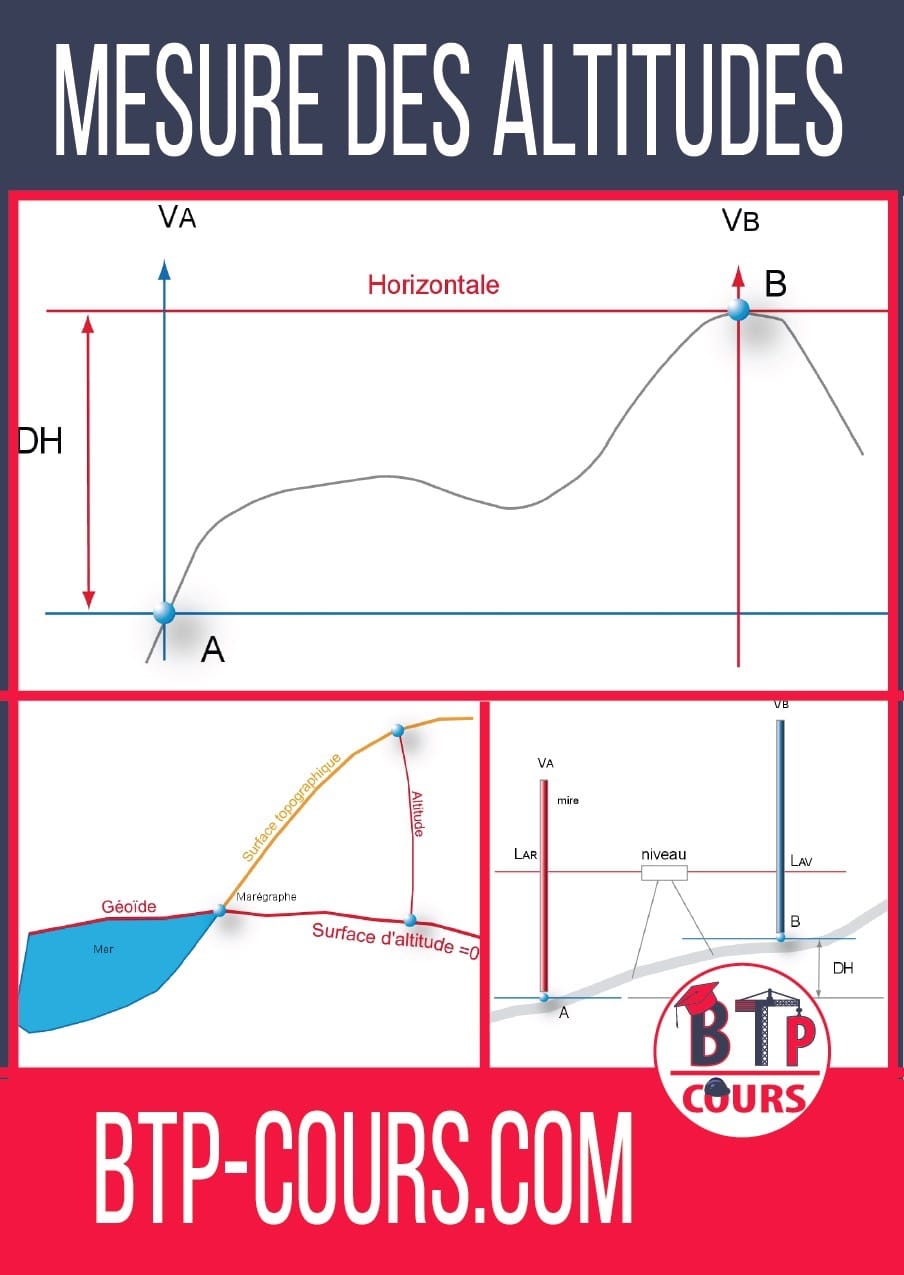
Si deux points A et B sont peu éloignés l’un de l’autre, on peut définir deux plans horizontaux parallèles passant par A et B qui sont perpendiculaires aux verticales et elles-mêmes parallèles entre elles.
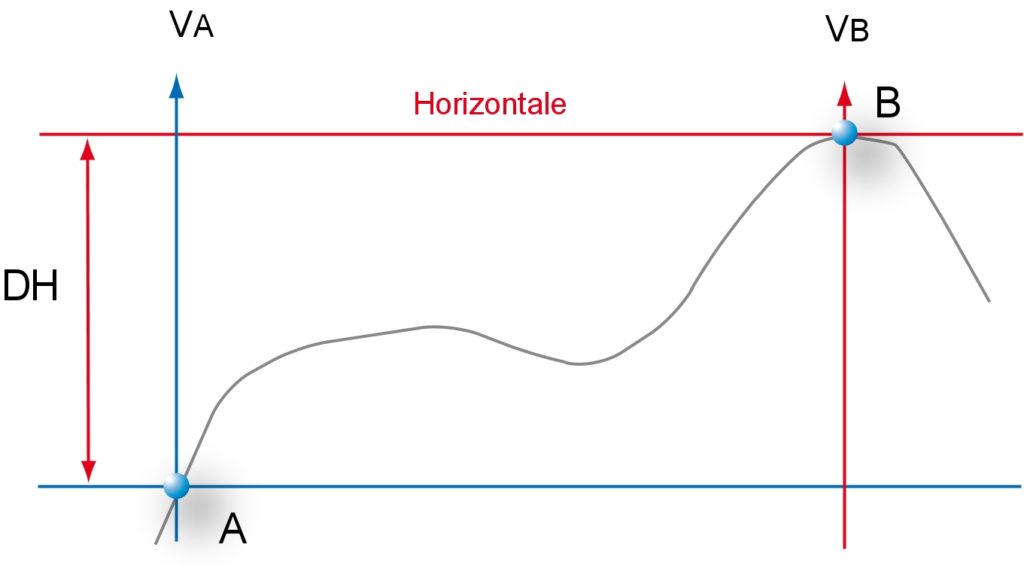
Une notion intuitive consiste à adopter comme différence d’altitudes entre A et B.
2. Nivellement direct ou géométrique
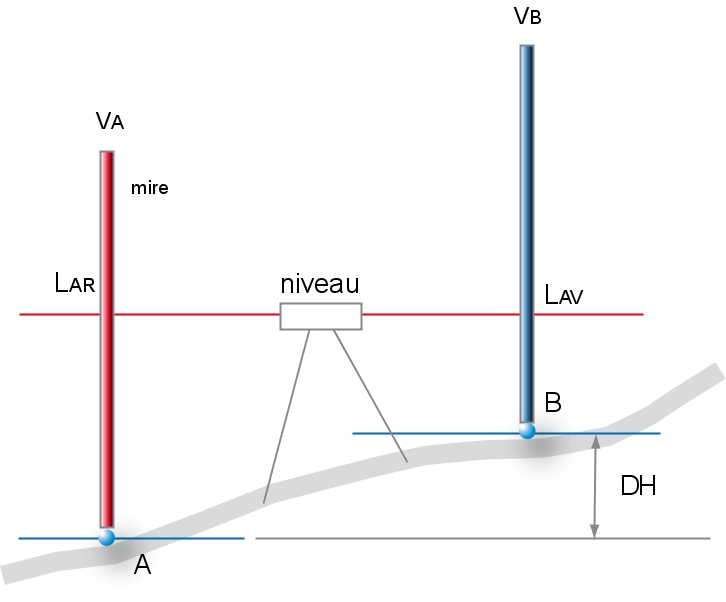
Le nivellement direct, ou nivellement géométrique consiste à mesurer la différence d’altitudes à partir de visées horizontales. Cette opération s’effectue à l’aide d’un niveau permettant de matérialiser une ligne de visée horizontale et d’une règle graduée verticale appelée mire.
Supposons l’altitude du point A connue, en notant LAR et LAV les lectures sur les 2 mires, l’altitude du point B s’obtient comme suit :
3. Nivellement trigonométrique
Le nivellement trigonométrique consiste à déterminer la dénivelée entre deux stations par des mesures de distances spatiales et d’angles zénithaux.
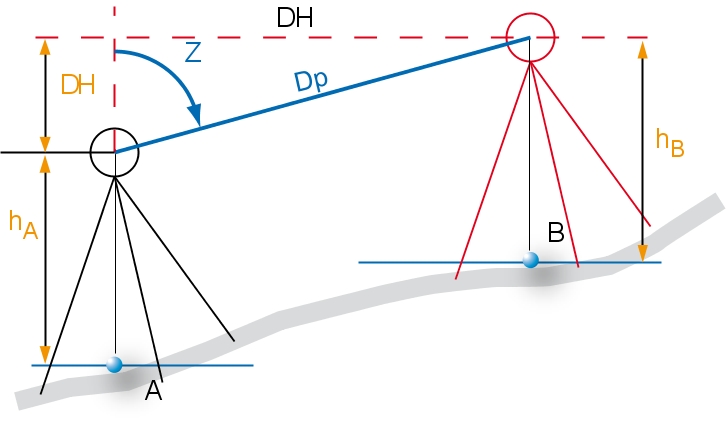
Le nivellement trigonométrique consiste à déterminer la dénivelée entre deux stations par des mesures de distances spatiales et d’angles zénithaux.
Un calcul simple conduit à la différence d’altitude entre A et B
Remarque préalable
- L’angle zénithal doit être préalablement corrigé de la collimation verticale.
- La distance spatiale doit être corrigée de la météorologie.
Cette modélisation simplifiée du problème ne tient pas compte :
- De la sphéricité de la Terre
- De la réfraction atmosphérique
La combinaison de ces 2 erreurs est dénommée erreur de niveau apparent.
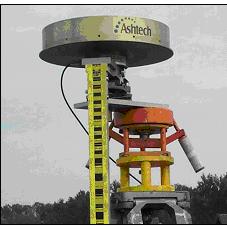
4. Nivellement par GPS
La détermination des coordonnées d’un point à l’aide du système GPS est basée sur la mesure du temps de propagation d’une onde électromagnétique entre le satellite et l’antenne réceptrice. Les coordonnées obtenues peuvent être cartésiennes (X, Y, Z) ou géographiques (λ φ) associées à une hauteur au-dessus de l’ellipsoïde « h ».
Pour convertir la hauteur ellipsoïdale en altitude plusieurs solutions sont envisageables.
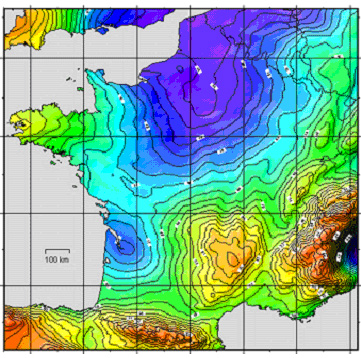
- La première solution, couramment employée par les utilisateurs du GPS, consiste à interpoler la hauteur du géoïde au-dessus de l’ellipsoïde à partir d’un modèle local obtenu en observant par GPS plusieurs points rattachés au nivellement. Cette solution, simple à mettre en œuvre, est risquée car la densité des points observés ne permet pas toujours de définir précisément la forme du géoïde, ce dernier pouvant présenter localement des écarts de plusieurs centimètres par kilomètre.[Une estimation de ces pentes a été réalisée sur l’ensemble des points nivelés du RGF. Les pentes les plus importantes sont de 9.5 cm/km dans les Pyrénées sur le Pic du Midi de Bigorre et de 9.1 cm/km dans les Alpes près de Bourg d’Oisans]
- Une seconde solution utilise un modèle global de géoïde convertissant directement la hauteur en altitude. Dans la pratique, deux modèles mondiaux de géoïde (OSU91 ou EGM96) sont utilisés. La précision de cette détermination, testée sur le territoire français, est de l’ordre de 30 cm en plaine et de 2 mètres en montagne.
- La troisième solution finalement adoptée est une combinaison des deux précédentes : calcul d’un géoïde national et adaptation à un ensemble de points connus à la fois dans les référentiels géodésique et altimétrique. La grille de correction, appelée RAF98 , s’appuie sur le modèle de quasi-géoïde français QGF98 et sur le Réseau de Base Français (RBF), constitué d’environ 1000 points connus à la fois dans les référentiels RGF93 pour les coordonnées géodésiques et NGF-IGN1969 pour l’altitude.
Partie C. Réseau de nivellement français
1.Réseau de nivellement
Fondamentaux
Un réseau est constitué d’un ensemble de points matérialisés dont l’altitude est connue et diffusée. Actuellement le réseau français de nivellement de précision se compose d’un réseau établi sur le territoire métropolitain (France) nommé NGF-IGN69, et d’un second en Corse appelé NGF-IGN78. Le réseau général de France est subdivisé en 4 réseaux de plus en plus denses, dits de 1er ordre (réseau composé de points primordiaux), 2ème, 3ème, et 4ème ordre.
| Ordre | Longueur (km) | Nombre de repères | Précision Ecart-Type |
| 1er | 13 754 | 22 440 | 2,0 mm |
| 2ème | 18 510 | 30 040 | 2,3 mm |
| 3ème | 45 600 | 76 080 | 3,0 mm |
| 4ème | 169 330 | 263 310 | 3,6 mm |
| Total | 247 194 | 391 870 | |
| Profil de | rivière 50 000 environ | 60 000 | |
| Total | 300 000 environ | 450 000 environ |
RÉSEAU DE NIVELLEMENT
IGN69 – France métropolitaineIGN69 – France métropolitaine
- Le territoire National comprend 40 polygones fermés de 1er ordre.
- Chaque polygone de 1er ordre est divisé en 7 mailles de 2ème ordre.
- Chaque maille de 2ème ordre est divisée en 10 à 15 mailles de 3ème ordre.
- A l’intérieur des mailles de 3ème ordre, on nivelle des traverses de 4ème ordre. Les
nombreux profils de rivières, nivellements réalisés le long des cours d’eau de 1910 à 1970, en vue de l’aménagement hydroélectrique du territoire, sont considérés comme des traverses de 4ème ordre.
L’altitude du repère fondamental du réseau NGF-IGN69 a été fixée à partir d’observations marégraphiques obtenues à Marseille du 1er février 1885 au 1janvier 1897. Le repère fondamental (altitude 1,661) est un rivet scellé dans le bâtiment abritant le marégraphe totalisateur, à Marseille (Anse Calvo)
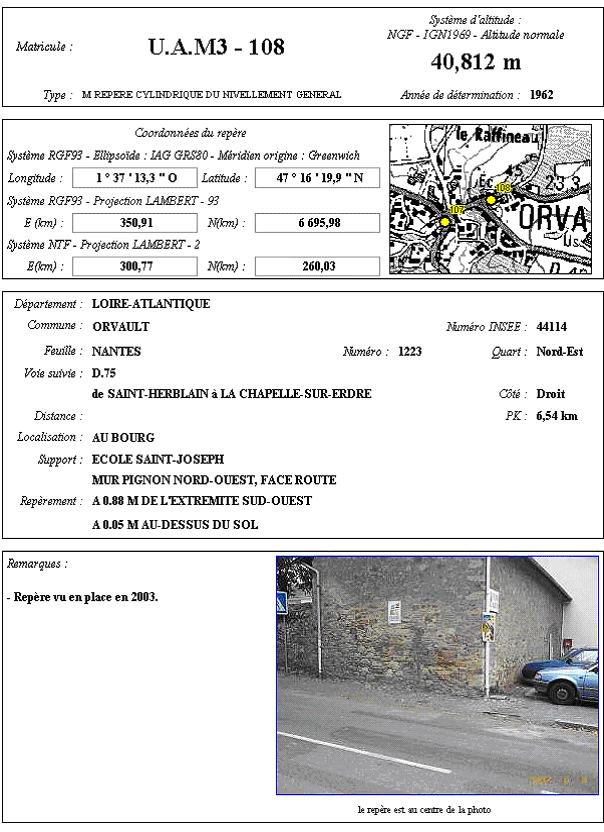
2.Exemple de fiche de nivellement
Les repères de nivellement sont actuellement disponibles gratuitement sur le site internet de l’IGN http://geodesie.ign.fr(février 2006) via une interface graphique
Au sommaire
Chapitre I. Définitions
Partie A. Altitudes
- Altitudes
Partie B. Nivellement
- Principes
- Nivellement direct ou géométrique
- Nivellement trigonométrique
- Nivellement par GPS
Partie C. Réseau de nivellement français
- Réseau de nivellement
- Exemple de fiche de nivellement
Chapitre II. Matériels utilisés en nivellement
Partie A. Niveaux
- Eléments constitutifs d’un niveau
- Niveaux à bulles
- Niveaux automatiques
- Niveaux numériques électroniques
- Dispositifs de lecture
- Dispositifs de lecture : lectures au micromètre
- Dispositifs de lecture : lecture numérique
Partie B. Mires
- Les différents types de mires
Partie C. Autres accessoires
- Supports de mires
- Trépieds
- Repères
Chapitre III. Erreurs en nivellement direct
Partie A. Erreurs liées aux niveaux
- Erreurs de lecture
- Faute de lecture
- Erreur de collimation
- Erreur de hauteur d’axe
Partie B. Erreurs liées aux mires
- Verticalité
- Défaut du talon de mire
- Appairage des mires
- Etalonnage des mires
Partie C. Erreurs dues au milieu
- Sphéricité
- Réfraction
- Stabilité du sol
Partie D. Méthodes d’observation
- Cheminement encadré : principe
- Cheminement encadré : stabilité
- Cheminement en boucle
- Nivellement par rayonnement
- Exemple de calcul
Chapitre IV. Préparations et réglages
Partie A. Réglage des matériels
- Nivelle sphérique du niveau
- Réglage de la collimation
- Réglage du niveau
- Nivelle sphérique de la mire
- Etalonnage des mires
Partie B. Procedure de mesures
- Mise en place du trépied
- Mise en place du niveau
- Calage à la verticale
- Mise au point du réticule de la lunette
- Mise au point de l’image vers la mire.